En un avance que parece sacado directamente de la ciencia ficción, un equipo de mentes innovadoras del Computer Science and Artificial Intelligence Laboratory (CSAIL) del MIT, junto con el AI Institute, han presentado recientemente una solución que revolucionará la forma en que los robots se adaptan y mejoran su funcionalidad en nuevos entornos.
El nuevo algoritmo permitirá que los robots practiquen habilidades como barrer y colocar objetos, mejorando potencialmente su rendimiento en tareas importantes en casas, hospitales y fábricas.
Este avance pionero allana el camino para que los robots se adapten y mejoren a la perfección, prometiendo un futuro apasionante de integración de la tecnología robótica en nuestra vida cotidiana.
En la Robotics Science and Systems Conference del mes pasado, los investigadores presentaron el algoritmo “Estimate, Extrapolate, and Situate” (EES), que permite a los robots aprender y mejorar sus habilidades de forma autónoma.
Este innovador planteamiento puede mejorar considerablemente la eficiencia en diversos entornos, desde fábricas hasta hogares y hospitales.
Mejorar el trabajo de los robots
Para mejorar el rendimiento de tareas como barrer el suelo, EES utiliza un sistema de visión que identifica y supervisa el entorno del robot.
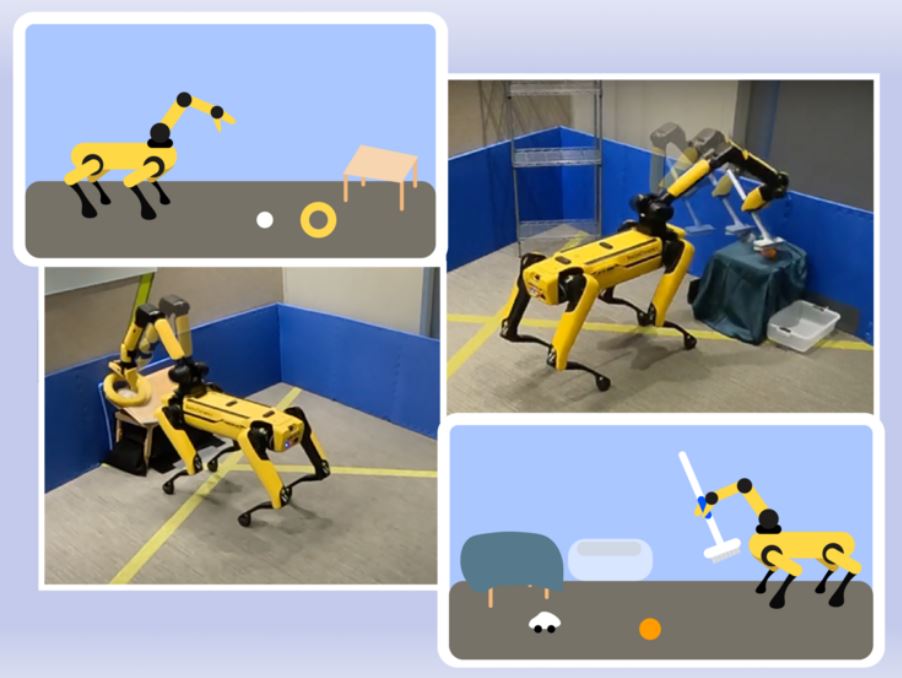
Un nuevo algoritmo desarrollado por investigadores del CSAIL del MIT ayuda a los robots a practicar habilidades por sí solos. En experimentos, guió a un cuadrúpedo barriendo y colocando diversos objetos. Crédito de imagen: Alex Shipps / MIT CSAIL
A continuación, el algoritmo calcula la fiabilidad con la que el robot realiza una acción, como barrer, y determina si merece la pena practicar más.
EES pronostica el rendimiento del robot en la tarea global después de perfeccionar la habilidad y practicar.
Después de cada intento, el sistema de visión comprueba si la habilidad se ha realizado correctamente. EES podría ser útil en hospitales, fábricas, casas o cafeterías.
Según Nishanth Kumar y sus colegas, con sólo unos pocos ensayos de práctica, EES podría ayudar a ese robot a mejorar sin intervención humana.
Kumar, coautor de un artículo que describe el trabajo, doctor en ingeniería eléctrica e informática y afiliado al CSAIL, dijo en un comunicado:
“Al iniciar este proyecto, nos preguntábamos si esta especialización sería posible en una cantidad razonable de muestras en un robot real.
Ahora tenemos un algoritmo que permite a los robots mejorar significativamente en habilidades específicas en un tiempo razonable con decenas o cientos de puntos de datos, una mejora respecto a los miles o millones de muestras que requiere un algoritmo estándar de aprendizaje por refuerzo”.
Resultados prometedores
La aptitud de EES para el aprendizaje eficaz quedó demostrada cuando se utilizó en pruebas de investigación con el cuadrúpedo Spot de Boston Dynamics en el AI Institute.
El robot, que tenía un brazo unido a la espalda, completó tareas de manipulación tras practicar durante varias horas.
En una demostración, el robot aprendió a colocar con seguridad una pelota y un anillo en una mesa inclinada en unas tres horas.
En otra, el algoritmo guió a la máquina para que mejorara barriendo juguetes en una papelera en unas dos horas.
Ambos resultados suponen una mejora respecto a marcos anteriores, que probablemente habrían tardado más de 10 horas por tarea.
Robots e inteligencia artificial en la vida cotidiana: desde hogares inteligentes hasta robots acompañantes. Crédito de imagen: Linkedin
Tom Silver, alumno de Ingeniería Eléctrica e Informática (EECS) y afiliado al CSAIL, que ahora es profesor adjunto en la Princeton University, dijo en un comunicado:
“Nuestro objetivo era que el robot recopilara su propia experiencia para que pudiera elegir mejor qué estrategias funcionarían bien en su despliegue.
Al centrarnos en lo que sabe el robot, intentamos responder a una pregunta clave: En la biblioteca de habilidades que tiene el robot, ¿cuál es la que sería más útil practicar ahora mismo?”.
Con el tiempo, EES podría ayudar a agilizar la práctica autónoma de los robots en nuevos entornos de despliegue, pero por ahora tiene algunas limitaciones.
Para empezar, utilizaron mesas bajas, lo que facilitó que el robot viera sus objetos. Kumar y Silver también imprimieron en 3D un mango acoplable que facilitaba el agarre del cepillo por parte de Spot.
El robot no detectó algunos objetos e identificó objetos en lugares equivocados, por lo que los investigadores contaron esos errores como fallos.
Los hallazgos de la investigación han sido publicados en el servidor de pre-impresión arXiv.org.
[FT: MIT]
¿Te gustó este contenido? Te invito a compartirlo con tus amigos. Síguenos en nuestra Página de Facebook, para recibir a diario nuestras noticias. También puedes unirte a nuestro Grupo Oficial y a nuestra comunidad en Telegram.
Crédito imagen de portada: depositphotos.com









0 comentarios